








智东西(公众号:zhidxcom)
编 | 韦世玮
导语:美国卡耐基梅隆大学(CMU)的博士生团队设计了一个新版本的仿生六足机器人,它能够在崎岖的地形中运动,并能抓住像砖块、木头和混凝土等粗糙的表面。
智东西6月15日消息,据IEEE Spectrum美国时间6月12日报道,在美国卡耐基梅隆大学的“机器人设计与实验”(Robot Design & experimental)课程中,一个叫ScienceParrot的学生团队根据“生物仿生机器人”主题,设计了一个新版本的仿生六足机器人RHex。
RHex是在2001年由密歇根大学和麦吉尔大学专门为在崎岖地形中运动而设计的仿生六足机器人,而ScienceParrot团队设计的新版本名为T-RHex,发音为T-Rex,就像恐龙一样。
虽然T-RHex同样是仿生六足机器人,但它除了拥有原版RHex的特性外,还能够完成更多的攀爬和悬挂操作。
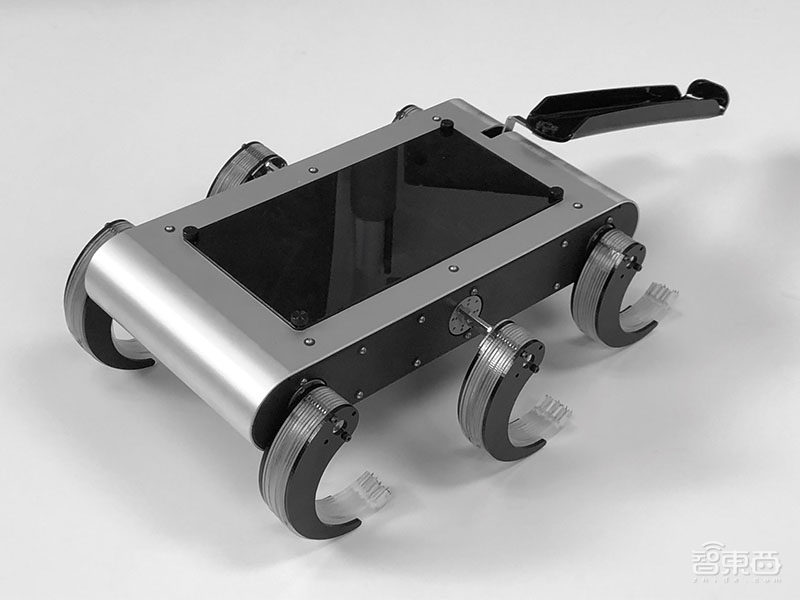
▲T-RHex
一、T-RHex:最高可悬挂在135度斜坡表面
T-RHex有尾巴,可以防止自己向后倾斜。更重要的是,它腿上有细小的锥形脚趾,有助于抓住像砖块、木头和混凝土等粗糙的表面。另外,依靠那细小的脚趾,它还能爬上非常陡峭的山坡并悬在上面,防止掉落。
T-RHex的脚趾也被称为微刺,许多机器人身上都有这个设计。尽管这个设计概念至少可以追溯到15年前斯坦福大学设计的壁虎机器人SpinyBot。但最著名的可能是喷气推进实验室(JPL)设计的攀岩机器人LEMUR IIB,这个机器人可以帮助宇航员在太空中检修及建设较大的建筑物,凭借微脊柱体积取胜。

▲LEMUR IIB
依靠微刺,T-RHex能够完成许多同类的攀爬和悬挂操作,并保持RHex快速、高效的轮腿(wheg)运动能力。
值得一提的是,由于它们的微刺必须小心地与接触面结合和脱离,因此往往使用微刺来攀爬的机器人都相当有条理。但是,这在一定程度上也限制了它们在非攀爬时的机动性。
有趣的是,T-RHex走路的样子很特别。它正常向前走路时,使用的是脚踝而不是脚趾。这意味着微刺在大多数情况下都不会被使用,因此T-RHex可以通过它的轮腿转动来绕行。

在攀爬时,为了与微刺配合,T-RHex会将轮腿向后移动,这意味着它的尾巴可以从脑袋伸出来。但由于T-RHex的所有功能在本质上都是机械的,而且它没有主动传感器,因此实际上它并不需要脑袋。
另外,T-RHex能攀爬的最高坡度是55度,这意味着它无法在垂直的墙壁上爬。但令研究人员惊讶的是,T-RHex能够紧贴地附着在135度的斜坡表面上,也就是45度的悬垂度。虽然连研究人员都不知道它是如何做到的,但如果它能保持这个状态,它的微刺将会继续完成自己的工作。
二、对话ScienceParrot团队:详解T-RHex四大特性
为了更进一步了解T-RHex的更多细节和特性,IEEE Spectrum特别通过电子邮件采访了ScienceParrot团队的博士生Catherine Pavlov。

▲ScienceParrot团队
IEEE Spectrum:初版的RHex的腿拥有柔顺和弹性的特点,那么新版T-RHex的腿将如何影响它的移动性?
Catherine Pavlov:虽然T-RHex的腿没有RHex那么多,但它的腿还是有一定的顺应性。因为出于预算和制造方面的原因,我们使用丙烯酸树脂来制作它的腿。
如果将RHex与丙烯酸树脂的柔顺性匹配起来,会使它的微刺过于脆弱,因为在攀爬过程中通常只有少数人能承受机器人的负荷,这绝对意味着T-RHex不能像RHex那样利用腿部进行能量储存。
然而,在机动性方面,T-RHex可能会受到电机速度的限制。另外,我们借用了智能执行器(Dynamixels)来设计,它们不允许高速的定位。
IEEE Spectrum:你们是如何设计T-RHex的攀登步态的?为什么不用中间的腿?为什么尾巴是必要的?
Catherine Pavlov:首先,步态设计经过了大量的手动调整和反复试验。我们想要一个左右对称的步态,以便T-RHex的脊柱能最大化地共享负载,防止腿向外扭曲。当T-RHex使用三双腿时,你必须有非常精确的角度定位,否则它其中的一条腿会被推离墙壁。
其次,由于两条腿就能支撑整个T-RHex的步态,因此使用中间的腿走路将会影响它的状态,有时甚至还会把后面的腿从墙上推下去。
最后,尾巴是用来防止T-RHex向后倾斜或“坐”在墙上的。在静态测试期间,我们曾看到它向后倾斜,前腿脱离,大约呈35度倾斜。因此,尾巴能使我们装载前腿,让它们与表面形成一个小角度。另外,我们设计的攀爬步态能利用尾巴使后腿完全再循环,并保持T-RHex不会向后倾斜。

IEEE Spectrum:是什么阻止T-RHex爬上更陡的表面?
Catherine Pavlov:T-RHex腿上的微刺很容易折断,我们还需要一个更轻的平台来让它的微刺能完全与接触面垂直,这也是我们将在未来工作中研究的MiniRHex。
虽然我们也不确信调整后的步态是最好的,但如果它能够通过不断的调整能得到微小的改善,这就足够了。
IEEE Spectrum:微刺能帮助T-RHex实现更多的动态操作吗?
Catherine Pavlov:动态攀岩动作算吗?从理论上来说,这只可能在附着力和强度都很好的表面上实现。但是,如果你试图让现在的T-RHex翻墙,它肯定会崩溃。
IEEE Spectrum:你们下一步的计划是什么?
Catherine Pavlov:我们的主要目标是探索用于腿部制造的材料空间,例如玻璃纤维、聚乳酸、聚氨酯和金属玻璃,并且腿部材料和几何形状还有很大的改进空间。
另外,我们还希望MiniRHex能配备微刺,它的尺寸大约是T-RHex的一半。而长期的改进将是给T-RHex增加传感器,用于墙壁检测、地板到墙壁过渡以及动态步态过渡。
文章来源:IEEE Spectrum
